Quadrocopter Ueberblick
Artikel veröffentlicht am 20.01.2013.Wie auf Twitter bereits zu sehen war, arbeite Ich momentan an meiner eigenen Quadrocopter Plattform. Kern der ganzen Geschichte ist xyControl:
Alle nötigen Sensoren, also 3D Accelerometer und 3D Gyroskop, sowie 3D Magnetometer, sind in einem Paket untergebracht, dem MiniMU-9 v2:

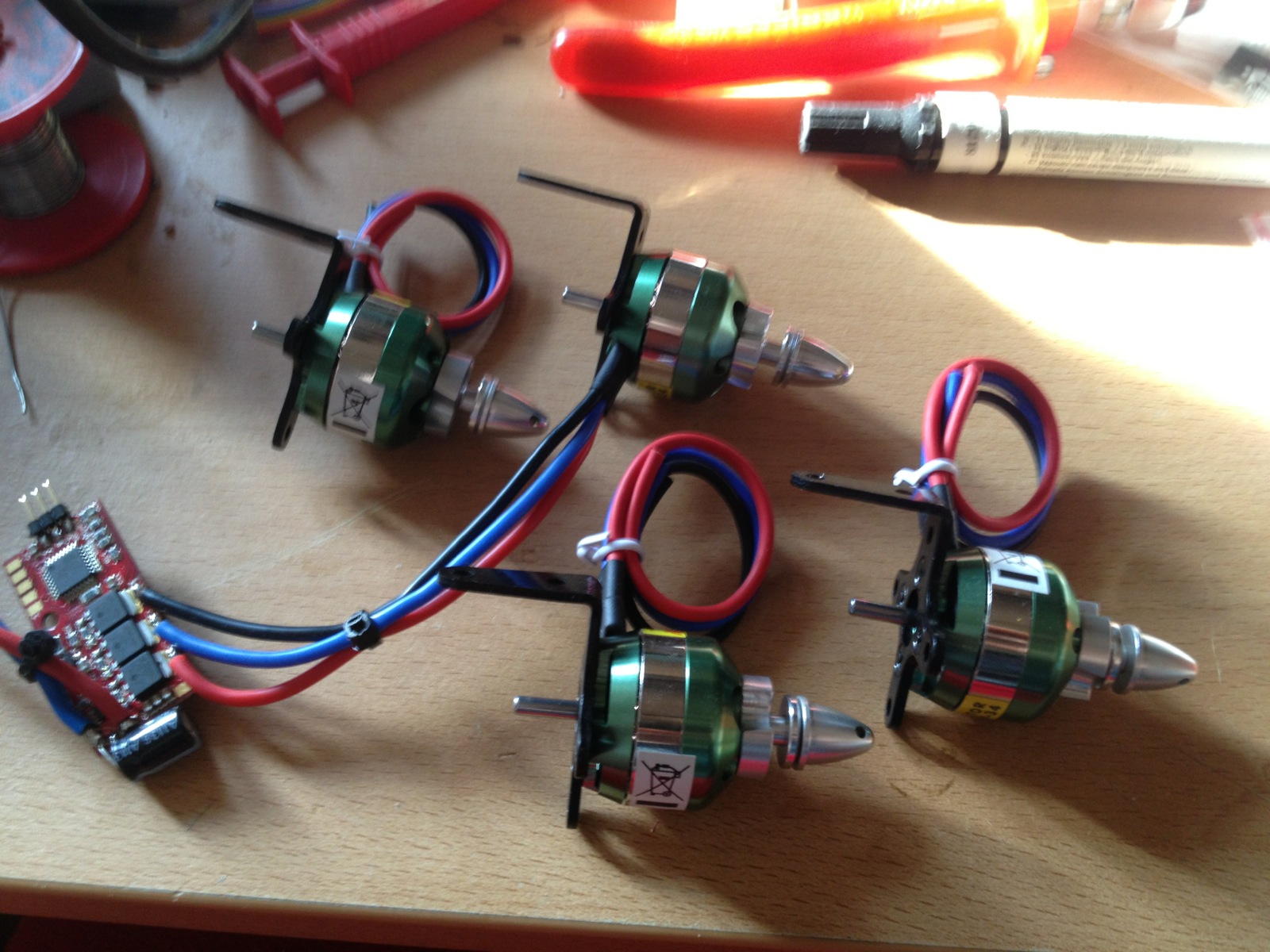
Verwendung finden außerdem vier BL-Ctrl v1.2 Brushlessregler, welche vier Robbe Roxxy BL Outrunner 2824-34 Motoren antreiben:
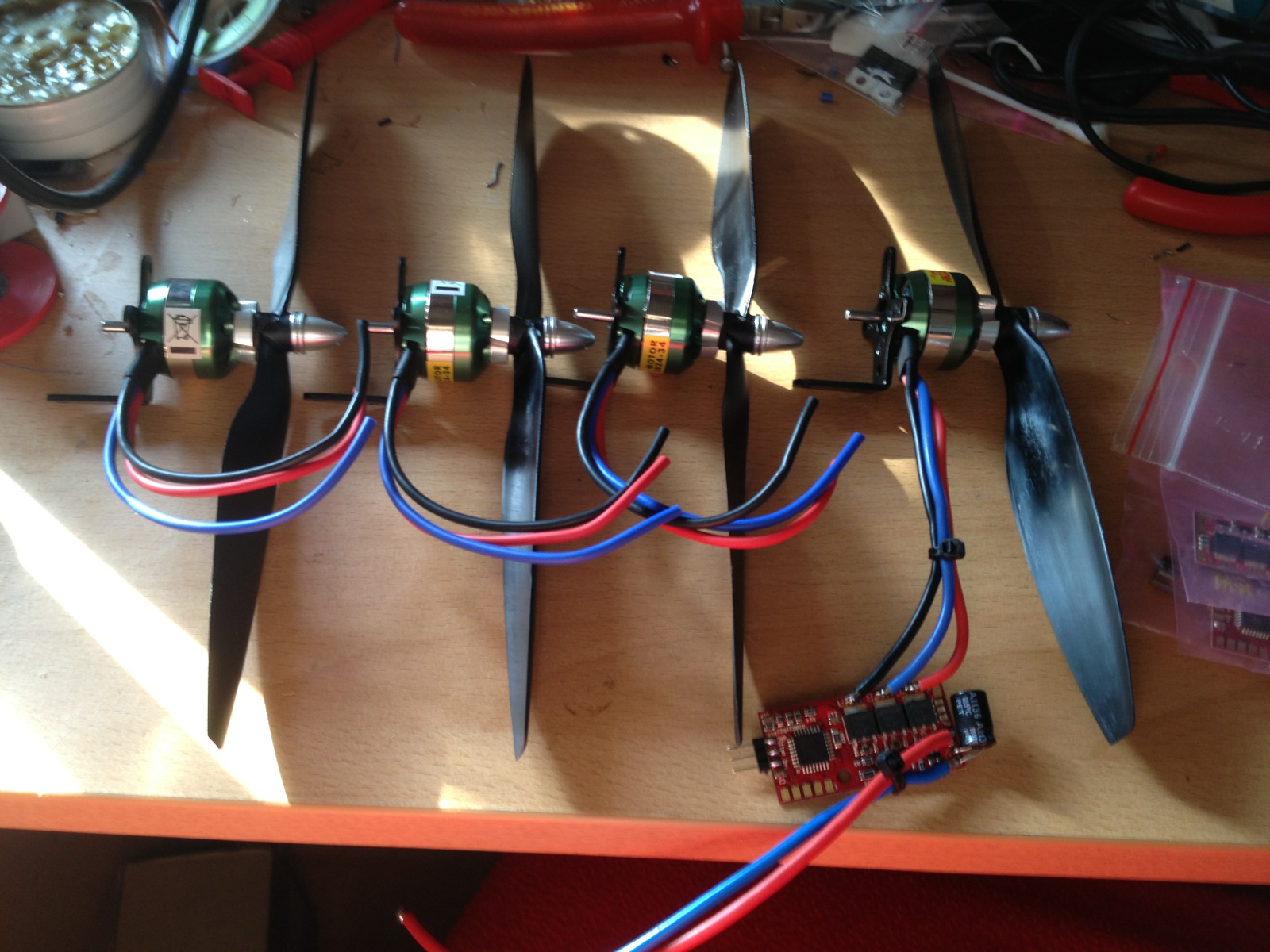
Und alles zusammen schaut momentan so aus:
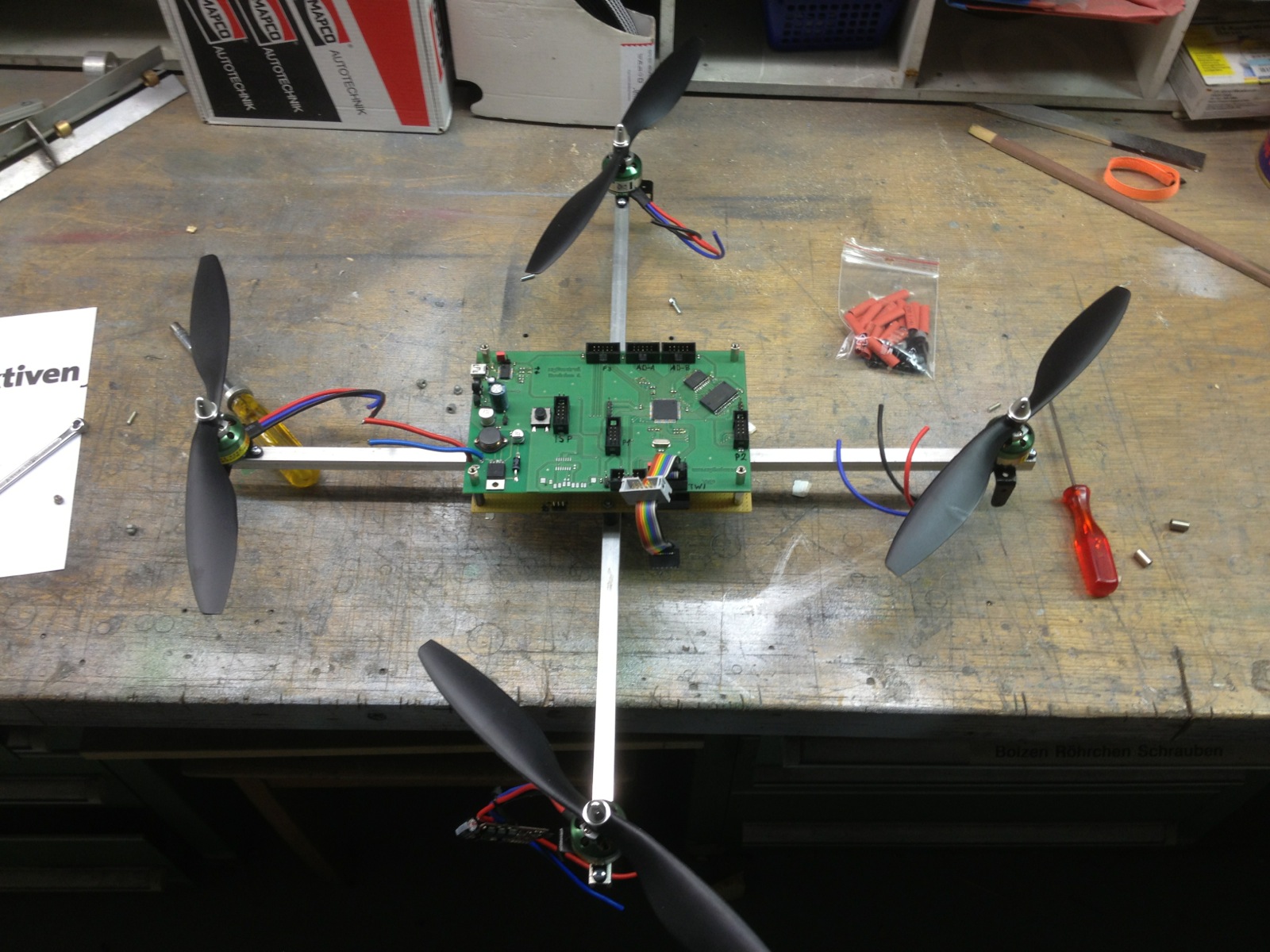
Ich bin zuversichtlich... :)

